Jak funguje sonar Deeper
Znalost základů toho, jak fungují sonary a jak číst informace z vyhledávače ryb, může znamenat rozdíl mezi nulovým a rekordním úlovkem. V naší krátké instruktáži ohledně funkce sonarů se naučíte základy práce s vyhledávačem ryb a dozvíte se praktické tipy, které vám usnadní čtení informací z vyhledávače ryb.
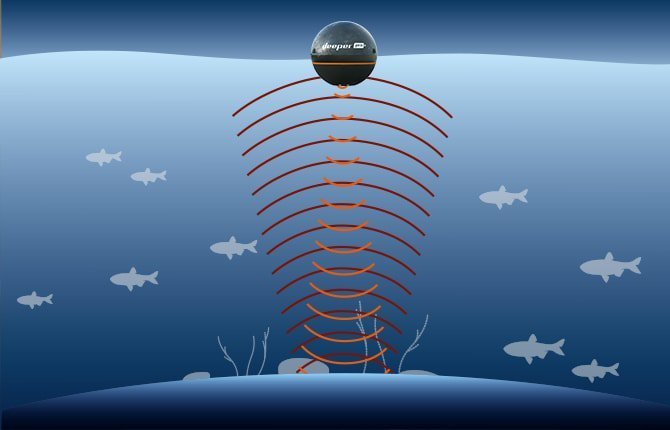
Slovo SONAR pochází z anglického výrazu SOund NAvigation Ranging (zvuková navigace a zaměřování). Sonarové zařízení vysílá pulzy zvukových vln procházející vodou směrem dolů. Když tyto pulzy narazí na objekty, jako jsou ryby, rostliny nebo dno, odrazí se zpět směrem k povrchu. Sonarové zařízení změří, jak dlouho trvá, než zvuková vlna dojde dolů, narazí na objekt a odrazí se zpět. Jedná se o stejný echolokační systém, jaký využívají netopýři a delfíni. Tyto informace zařízení umožňují vyhodnotit, v jaké hloubce se nachází objekt, od kterého se zvuková vlna odrazila. Měří také sílu zpětného pulzu – čím je objekt tvrdší, tím je zpětný pulz silnější.
Po přijetí zpětného pulzu je vyslán další pulz. Vzhledem k tomu, že zvukové vlny ve vodě cestují rychlostí přibližně jedné míle za sekundu, mohou sonary každou sekundu vyslat několik pulzů. Sonary Deeper PRO a Deeper PRO+ vysílají 15 pulzů za sekundu. Zpětné zvukové pulzy jsou převáděny v elektrické signály a následně zobrazovány tak, aby rybář viděl hloubku i tvrdost dna a všechny objekty nacházející se mezi ním a dnem.
Pulzy sonaru mají kuželovitý, nikoli válcovitý tvar
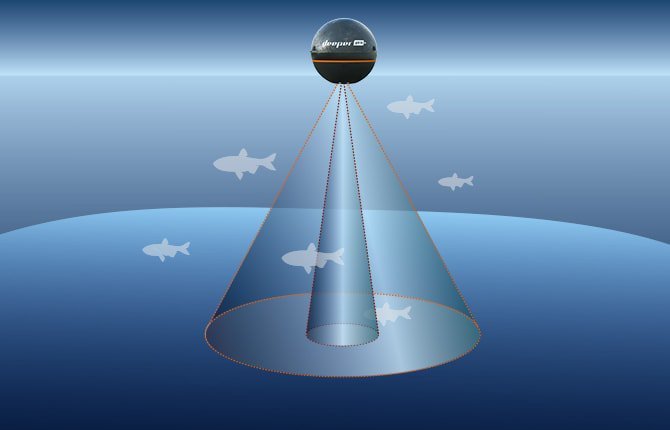
Když čteme informace z vyhledávače ryb, zpravidla si představujeme, že údaje, které vidíme na obrazovce, platí pro prostor přímo pod sonarem. Proto když na obrazovce uvidíme rybu, myslíme si, že se musí nacházet přesně pod sonarem. Pravda je ale taková, že zobrazené informace přicházejí z širší oblasti pod sonarem. Je důležité si uvědomit, že čím hlouběji skenujete, z tím širší oblasti sonar přijímá údaje. Je tomu tak proto, že pulzy sonaru mají kuželovitý tvar.
Funguje to následovně
Sonary vysílají pulz zvuku za účelem lokalizování objektů. Zvuk prochází vodou nikoli ve válcovitém tvaru, ale vlny se postupně rozšiřují, a tak vzniká kuželovitý tvar.
Většina sonarů dokáže řídit rozsah kuželu zvukové vlny změnou frekvence skenovacího paprsku. To je důležité, protože v různých situacích mohou být více nebo méně efektivní jiné skenovací paprsky.
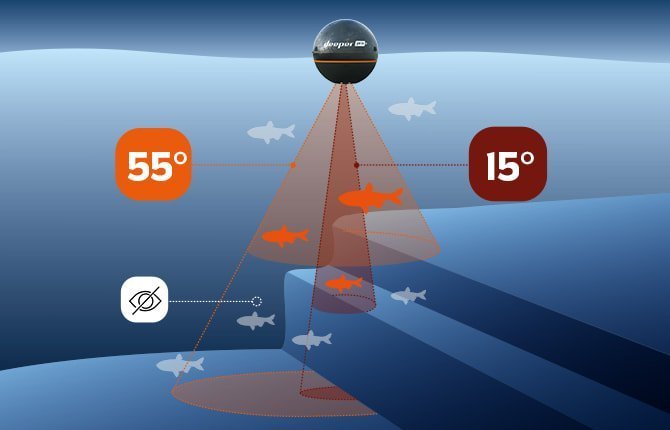
Skenování širokým paprskem (obvykle v úhlu 40° až 60°) je vhodný pro rychlé skenování velkých oblastí a získávání úhrnných informací o hloubce a struktuře dna, kdežto přesnost a detail budou nižší. Skenování širokým paprskem je ideální v mělčích vodách, protože kužel pokryje větší oblast, čím hlouběji sonar skenuje. To znamená, že pokud skenujete do hloubky 13,7 m, vidíte objekty v oblasti o poloměru 14,3 m.
Skenování úzkým paprskem (obvykle v úhlu 10° až 20°) vám přináší přesnější údaje, ale pokrývá menší oblast. Je vhodnější k vyhledávání přesné polohy ryb. Skenování úzkým paprskem je také vhodnější v hlubších vodách, protože se kužel nerozšíří příliš.
Rušivé odrazy a mrtvé zóny
Další faktor, který je nutno vzít v potaz a souvisí s šířkou kuželu, je skutečnost, že v některých případech nebudete moci detekovat objekty nacházející se přímo pod vodní hladinou.
Příčinou je známý jev označovaný jako rušivé odrazy, které jsou společné všem sonarům. K rušivému odrazu dochází, protože voda blízko hladiny odráží některé vlny sonaru a protože tyto odrazy jsou příliš rychlé na to, aby je sonar dokázal správně zpracovat. Tyto odrazy mají řadu příčin, přičemž mezi nejběžnější patří vlny na hladině, bubliny, proudy a řasy. Výsledkem je velké množství „šumu sonaru“ blízko hladiny. Tím se vytvoří „mrtvá zóna“, ve které nelze zjišťovat ryby.
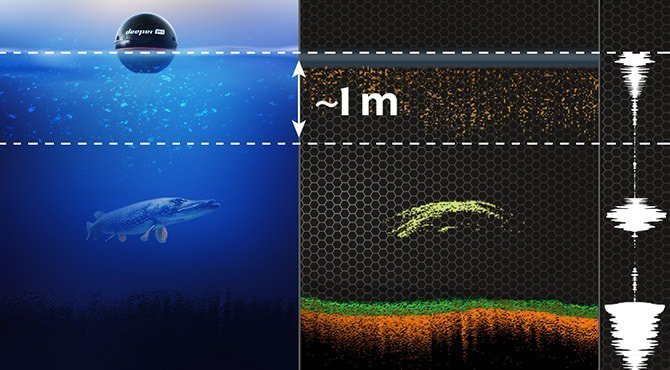
Míru odrazu (šumu) a velikost mrtvé zóny je možné omezit při použití vyšší frekvence sonaru. Takže pokud máte sonar Deeper PRO nebo PRO+ a zaznamenáváte hodně rušivých odrazů, přepněte na skenování pomocí vyšší frekvence (úzký paprsek při 290 kHz, 15°). Pokud máte sonar Deeper START, jeho frekvence 120 kHz značí, že rušivé odrazy mohou proniknout až 1 metr pod vodní hladinu.
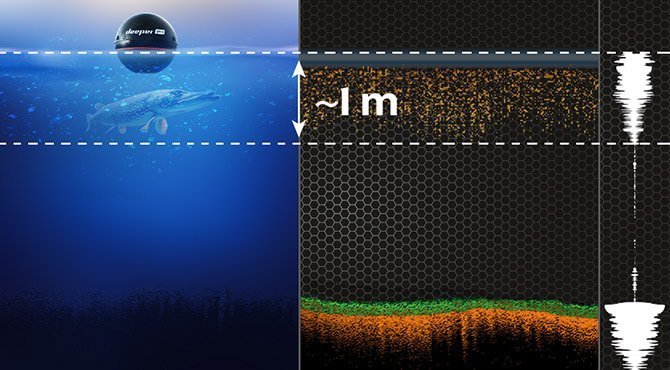
Na obrázku vedle jsou znázorněné 2 různé situace, za kterých může rušivý odraz ovlivnit data sonaru (v těchto příkladech rušivý odraz proniká přibližně až 1 metr pod hladinou):
- Ryba je pod zónou rušivého odrazu. V této situaci je odraz sonaru od ryby dostatečně silný na to, aby ji vyhledávač ryb mohl zjistit (aplikace Deeper v případě vyhledávačů ryb Deeper používá algoritmus, který umožňuje objekt vyhodnotit jako rybu). Proto aplikace rybu zobrazí.
- Ryba je v zóně rušivého odrazu. Odraz sonaru od této ryby je smíšený s rušivým odrazem, takže je příliš slabý na to, aby vyhledávač ryb mohl rybu detekovat. Následkem toho se ryba v aplikaci nezobrazí.
Proč je to důležité pro …
Vyhledávání ryb
Při vyhledávání ryb nepředpokládejte, že je každá ryba, kterou zpozorujete, přímo pod sonarem. Je třeba si uvědomit, že se nachází někde v rámci kužele pod sonarem. A pamatujte si, že čím hlouběji se nachází, o to větší oblast se může jednat. Pokud se ryba nachází na mělčině, pak víte, že bude více či méně přímo pod sonarem, zejména pokud používáte úzký paprsek. Jestliže je ryba hluboko, může se nacházet v mnohem širší oblasti a mnohem dále od sonaru.
Tip pro sonar Deeper: Při lovu ryb použijte nejprve široký paprsek k nalezení oblasti s rybami a poté přepněte na úzký paprsek a několikrát danou oblast proskenujte, abyste nalezli jejich přesnou polohu.
Vyhledávání struktury a profilu dna
Další koncepcí, kterou byste měli při vyhledávání profilu dna znát, je takzvaná mrtvá zóna. Sonar využije první část dna, kterou detekuje, jako základ pro vyznačení dna na vaší obrazovce. Pokud ale kužel detekuje prohlubeň, může se zde nacházet hlubší úsek, který ale není ve skenování zahrnut – tato oblast se stává mrtvou zónou (viz schéma).
Tip pro sonar Deeper: Použitím úzkého paprsku minimalizujete pravděpodobnost výskytu mrtvé zóny na displeji. Pokud naleznete prohlubeň nebo výstupek, několikrát ji/jej proskenujte úzkým paprskem.
Posouvající se obrazovka neznamená pohyb sonaru (ani velké množství ryb)
V aplikaci Deeper a na displejích mnoha dalších sonarů jsou údaje zobrazovány tak, že jsou posunovány zprava doleva. V pravé části displeje naleznete nejnovější výsledky, nejstarší výsledky se zobrazují vlevo. Je třeba si pamatovat na to, že se obrazovka bude posunovat, i když se sonar nepohybuje, protože jednotka neustále odesílá a přijímá zvukové pulzy. Znalost funkce tohoto posunujícího se displeje je velice důležitá k tomu, abyste dokázali vyvodit závěry z údajů přijatých ze sonaru.